Z32-10A型钢球自动冷镦机顶料机构的设计
摘要:钢球自动冷镦机上用于顶出料棒及顶出钢球的顶料机构的结构设计。
关键词:冷镦机 机构 结构设计
1. 引言
钢球自动冷镦机是轴承用钢球制造过程中的初步成形设备,绝大多数已经国产化。Z32-10A型是改进后的,设计最大制造直径为10mm的线材自动成型设备。通过对以前同类设备的不足进行总结,我们将冷镦机的钢料切断刀改进成套筒刀,以解决因为钢料切断口倾斜而影响钢球质量的问题。因此,在原顶料机构(只解决钢球粘模问题)基础上增加了出料杆,用于将套筒刀中已切断的钢料棒顶入送料装置的夹钳机构
2. Z32-10A型钢球自动冷镦机顶料机构的工作原理
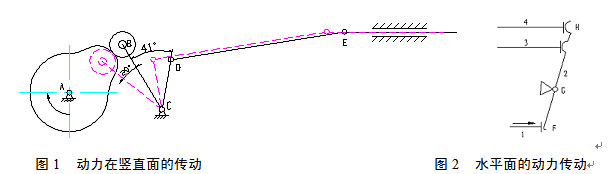
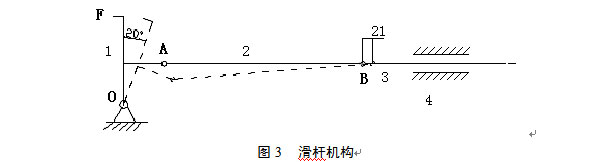
顶料机构是由在两垂直面内运动的两部分组成。如上图(图1、图2)所示,图1表示的就是动力在竖直面内的传递简图。动力由主轴上的一个凸轮传递到摆杆上端B,摆杆绕C摆动将动力传递到E端,然后再传递到杠杆F端(如图2中所示),杠杆绕支点G摆动再将动力传到H端,杠杆H端顶打料杆3和出料杆4,完成预定功能。
3.1 竖直面的顶动机构
通过对四杆机构的演化,可以得到各种各样,形形色色的平面机构。兼顾到各方面的要求,我们设计了一种演化得到的不很常见的平面机构,就称之为滑杆机构,如图3所示。
(1) 摆杆
摆杆可谓是这个机构的动力源,其在承受凸轮的冲击力外,还承受后继杆件的反作用力,因此,其结构设计与材料的选择同样重要。
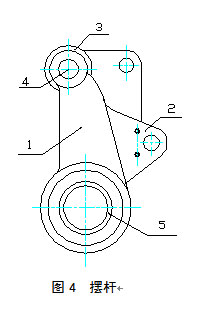
考虑到这个构件的形状较复杂,应该采用铸造成型;又考虑到受力及材料的强度、刚度等,我们选用工程常用铸钢。图4是安装了滚轮及轴套的摆杆的主视结构。(图)
图中,1所指的是摆杆的主受力臂;2指的是连接后继的前连杆的“耳部”;3指的是滚轮;4指的是铰接上滚轮的销轴;5所只得就是轴套。其中摆杆上端采用向外弯曲的设计,以增大主受力臂的受力强度。通过查阅机械设计手册,并结合本人经验,摆杆的具体材料为ZG270-500型铸造碳钢,其标准符合国标(GB11352-89)。此种钢材相当于旧标准(GB979-67)的ZG35。此构件的形状比较复杂,但多数尺寸需由其他构件尺寸决定。如铰接端的圆径尺寸由悬臂轴的轴径及轴套厚度决定,“耳”上及安装滚轮的销轴轴孔直径尺寸由销轴的校核尺寸决定,滚轮位置的开槽宽度由滚轮决定,还有“两耳”的间距尺寸由总厚的过渡选定,等等。
(2) 连杆
连杆机构是一种常用的传动机构,广泛的应用与各种机械、仪表及操纵装置中。连杆机构中各构件间的相对运动是平面运动还是空间运动,可将连杆机构分成平面连杆机构和空间连杆机构两大类。一般机械中多采用平面连杆机构。
在连杆机构中的运动副都是低副。由于低副两元素为面接触,所以在同样的载荷条件下,其两元素间的压强比高副接触的压强低,故连杆机构可以传动较大的力。而且低副元素的几何形状比较简单,故也便于加工。另外,在其原动件的运动规律不变的条件下,只要改变各构件间的相对长度,就可以使其从动件实现不同的运动规律要求。连杆机构的缺点是其必须经过中间构件作运动传递,而由于不可避免的制造误差和运动副之间的间隙,致使运动传递中的误差环节较多,另外,由于连杆是平面运动机构,其所产生的惯性力难以平衡,故连杆机构不宜用于精密及高速传动。此处连杆为铰接,为了安装方便简化结构,把保险板结构用保险销代替,可以防止因过载造成的损害,这样即简化结构又便于安装。
(3) 滑动顶杆
滑动顶杆处于机构的头部,其结构比较简单,样式与前连杆相似,但其加工精度较高。因为滑动顶杆要在床架约束的轴套中来回运动,其表面粗糙度应提高精度。
3.2 顶料机构的其它部分
顶料机构的其他部分还有,摆杆头的复位装置、杠杆、杠杆轴、出料杆、出球杆等部件。
其中出料及出球的顶杆因为直径较小,表现为“细长”,所以采用多段组合的方法,分段加工,而后对中组装,每段杆都有复位弹簧支撑。其中尤其出球杆的复位弹簧较大,回复力较大。这是因为在设计中考虑到顶杆与杠杆的冲击及出球、出料顶杆的顶出长度的调节控制,我们采用较强的复位弹簧,使弹簧始终处于压缩状态的方法,使杠杆与顶杆及滑动顶杆的顶头总是接触的。这样,顶杆与杠杆的冲击就会减小,增大使用寿命;顶杆顶出长度通过调节滑动顶杆上的顶头就可以很容易获得。
结束语
Z32-10A型钢球自动冷镦机上经过改造后的顶料机构,结构更加趋于合理、有效,能够准确实现出料、出球的动作;而且改进了安全保护装置,提高了机床的安全性和可维护性。
参考书目
[1] 机械设计与理论 李柱国主编 北京科学出版社 2003.8
[2] 机械设计与制造简明手册 唐保宁、高学满 同济大学出版社 1993.7
[3] 机械原理 赵卫军等 西交通大学出版社 2003.3
[4] 机械设计 濮良贵、纪名刚主编 高等教育出版社 2001.6